pp2web¶
Che cos’è?¶
pp2web (post-processing to web) è una webapp lato server che permette di post-elaborare dati provenienti da sessioni grezze ad esempio acquisite con l’app mobile rawX in modalità:
- Single
- Statica
- Cinematica
- Stop&Go (new)
Come si utilizza?¶
Previa registrazione via mail a solutop@gmail.com è possibile richiedere l’attivazione in prova (a tempo) o perpetua. Successivamente avute le credenziali di accesso utilizzare il seguente link per accedere.
pp2web permette di:
- scegliere la modalità di post elaborazione (Single, Statica, Cinematica, Stop&Go)
- caricare un file grezzo del rover in formato .ubx (Single, Statica, Cinematica)
- caricare un file rinex della master in formato .YYo o .obs (solo per Statica, Cinematica, Stop&Go)
- caricare un file degli intervalli degli Stop e dei Go del rover in formato .csv (solo per Stop&Go)
- inserire LLE nel caso si conoscano le geografiche precise dello stazionamento della master (solo per Statica, Cinematica, Stop&Go)
- elaborare il/i file uploadati
- visualizzare i punti su OSM a video
- scaricare un file zip contenente sia il file .csv che un report in pdf in formato latex
- rivviare l’app per riutilizzarla
Il posizionamento relativo¶
Ma facciamo un piccolo passo indietro e cerchiamo di capire che cos’è il posizionamento relativo.
Quando si parla di post-processing GNSS si fa rifermento alle tecniche di posizionamento relativo che permette di determinare la differenza di coordinate (baseline) tra due o più punti occupati contemporaneamente da più ricevitori che sono in grado di acquisire sia codice che fase.
Può essere effettuato sia in modo statico (i ricevitori vengono mantenuti in posizione per una sessione di misura la cui durata varia da pochi minuti ad alcune ore in funzione della lunghezza della baseline) sia in modo cinematico (un ricevitore resta fisso, l’altro o gli altri si muovono occupando successivamente i punti da rilevare o seguendo un percorso continuo).
Nota
L’elaborazione viene effettuata in post-processamento (differita, quindi non in tempo reale), a partire dai dati grezzi (raw data) acquisiti dai ricevitori. Il modo statico può raggiungere una accuratezza di posizionamento relativo dell’ordine di 0.5-1cm e viene utilizzato per determinare reti di baselines a scopo di inquadramento o di controllo delle deformazioni.
Il modo cinematico viene utilizzato soprattutto per la ricostruzione di tracciati e della cinematica di veicoli (Catasto Stradale, studio del moto di veicoli, …). Qui sotto un esempio di posizionamento relativo
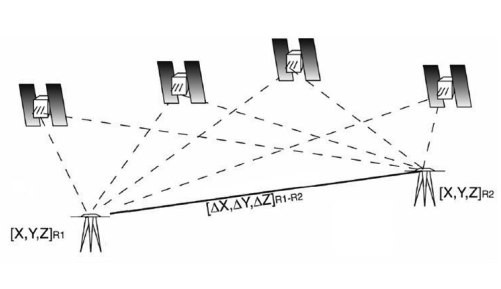
Fig.1 Tecnica del posizionamento relativo GNSS
Nel caso della figura qui sopra, i due ricevitori effettuano osservazioni satellitari nel medesimo istante ai medesimi satelliti. Dette osservazioni vengono in seguito elaborate per poter stimare la baseline (vettore 3D) fra i due ricevitori.
Suggerimento
Il modo in cui il rover misura determina le tecniche di posizionamento. Spesso il GNSS lo si utilizza a scatola chiusa. Si registra la misura senza sapere quali sono i limiti, quindi bisogna investire un po’ di tempo a capire come funziona queta tencica di posizionamento.
La precisione dipende da:
- dal tipo di ricevitori (tipo di osservabili acquisibili)
- dalla distanza fra i ricevitori (da <10 km a >500 km)
- dal metodo di rilievo (durata dello stazionamento sui punti)
- dall’approccio di elaborazione dei dati (tempo reale, post processamento)
- 1-2 m (relativo sui codici in tempo reale) usata in navigazione
- qualche cm (doppia frequenza, statico-rapido) topografia e rilievi gis
- millimetrica (doppia frequenza, statico lungo con tecniche di compensazione) deformazione crostale
Promemoria
- il post processo si applica a rilievi acquisiti in posizionamento relativo
- sono necessarie, per ogni punto del rilievo, le registrazioni (dette anche osservabili o osservazioni) di fase e consigliate anche quelle di codice.
- sono necessarie le informazioni relative alle orbite dei satelliti navigazionali (file brdc) che contengono i parametri delle orbite traiettorie delle orbite (file sp3)
- le registrazioni devono essere eseguite in contemporanea su uno o più punti di coordinate note e sui punti noti sede del rilievo
- l’ambiguità intera di fase viene risoltadall software di elaborazione
- il tempo di occupazione è fondamentale per risolvere l’ambiguità intera di fase
- i tempi di occupazione dipendono dal tipo dal ricevitore, dalla lunghezza della baseline, dalla geometrica satellitare e da eventuali sorgenti di multipath
Stop&Go¶
La modalità Stop&Go è una tecnica di rilievo con ricevitori geodetici GNSS doppi (uno fisso e uno mobile), che sfrutta le osservazioni di fase delle onde portanti per ottenere coordinate molto precise.
Nota
A differenza della modalità statica, in cui il rover resta fermo per 10-30 minuti su ogni punto, in Stop&Go il rover si ferma brevemente (10-30 secondi) su ciascun punto dopo una fase iniziale di fissaggio delle ambiguità.
Fasi operative¶
- a. Inizializzazione (Fix delle ambiguità)
- Si inizia da un punto noto o di controllo.
- Il rover resta fermo per 2–5 minuti per permettere al software di risolvere le ambiguità intere (numero intero di cicli della portante tra satelliti e ricevitori).
- Quando il fix è completato (soluzione «fixed»), si può procedere al rilevamento dei punti successivi.
- b. Spostamento tra i punti (Go)
- L’operatore si muove verso il nuovo punto senza spegnere o interrompere il ricevitore, mantenendo la continuità delle osservazioni.
Avvertimento
- È fondamentale non perdere mai il segnale o la soluzione fixed. Se si entra in gallerie, sotto alberi fitti, o si blocca la visuale satellitare, il fix può essere perso.
- c. Rilevamento dei punti (Stop)
- Su ogni punto di interesse, il rover viene posizionato e mantenuto stabile per circa 10-30 secondi.
- Durante questo tempo, vengono raccolti i dati GNSS per calcolare le coordinate con precisione centimetrica o subcentimetrica.
- Si annota un identificativo del punto, tempo di occupazione, eventuali note.
Suggerimento
- È consigliabile tornare su alcuni punti già misurati per fare un controllo di precisione (chiusura del poligono, controllo ripetibilità).
- Se la soluzione fixed viene persa, si deve ripetere l’inizializzazione su un punto noto.
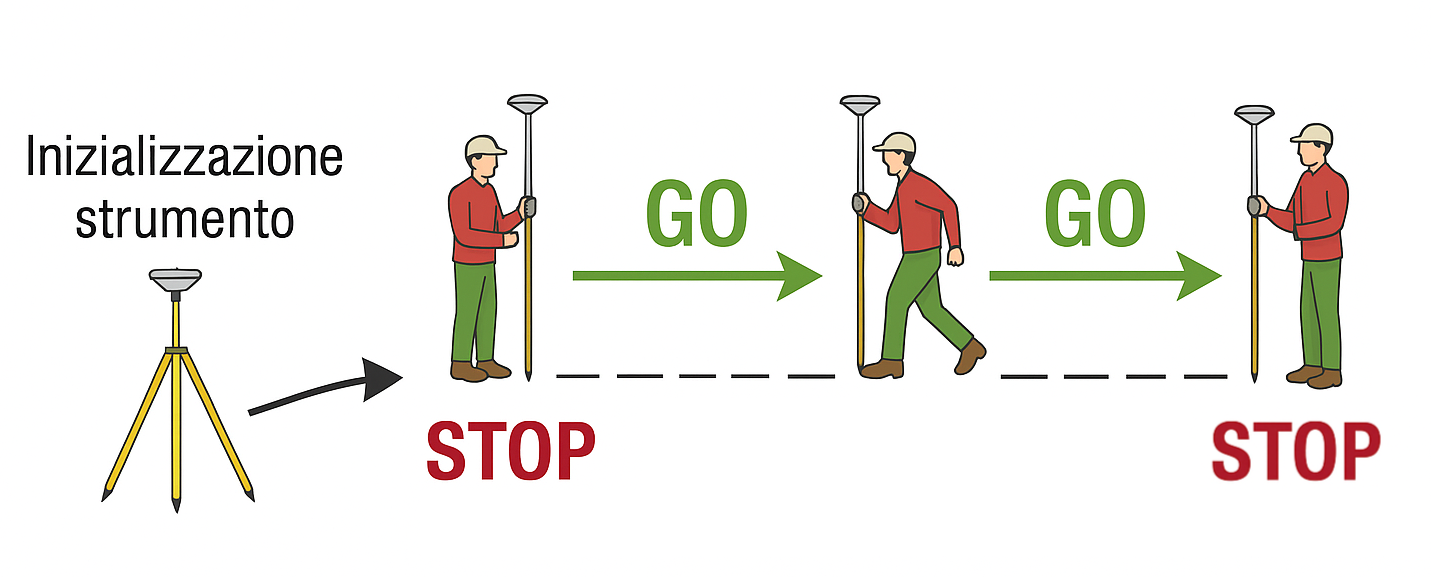
Fig.2 Rilievo in modalità cinematica Stop&Go
Vantaggi¶
- Alta precisione (millimetrica–centimetrica).
- Maggiore flessibilità rispetto alla modalità statica pura.
- Più veloce del rilevamento statico classico.
Svantaggi¶
- Richiede visibilità continua dei satelliti e del segnale dalla base.
- Richiede una fase iniziale di fix e attenzione a non perdere il lock delle fasi.
Strumentazione¶
- Base GNSS (fissa): posta su punto noto, registra dati RINEX o trasmette correzioni RTK.
- Rover GNSS (mobile): riceve i dati satellitari e le correzioni dalla base.
- Palina con bolla: per garantire verticalità del punto.
- Bipiede:per garantire la verticalità della palina
- Controller con software da campo: per registrare punti e metadati.
Applicazioni¶
- Rilievi catastali e di alta precisione.
- Monitoraggio strutturale o ambientale.
- Reti di inquadramento geodetico.
- Zone senza copertura radio (es. montagne, isole, aree remote).
La procedura¶
Nella figura sottostante viene visualizzata la schermata principale nel momento ci si collega alla webapp tramite il link sopra citato
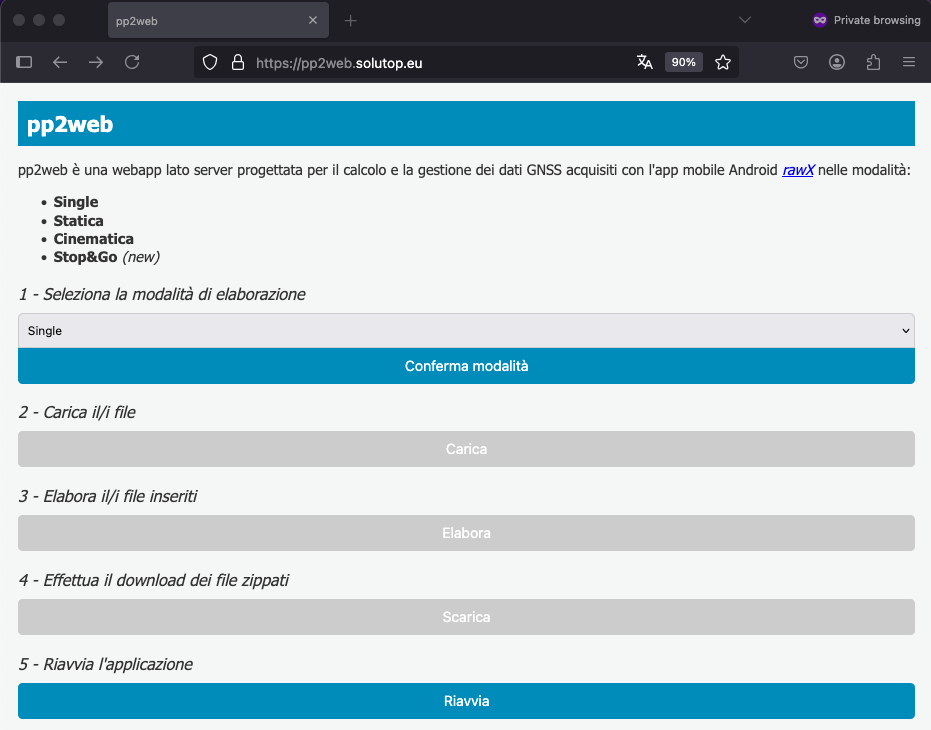
Fig.1 Schermata all’avvio della webapp
Successivamente si sceglie la modalità di elaborazione del dato grezzo tra single, statica, cinematica o stop&go come da schermata sotto
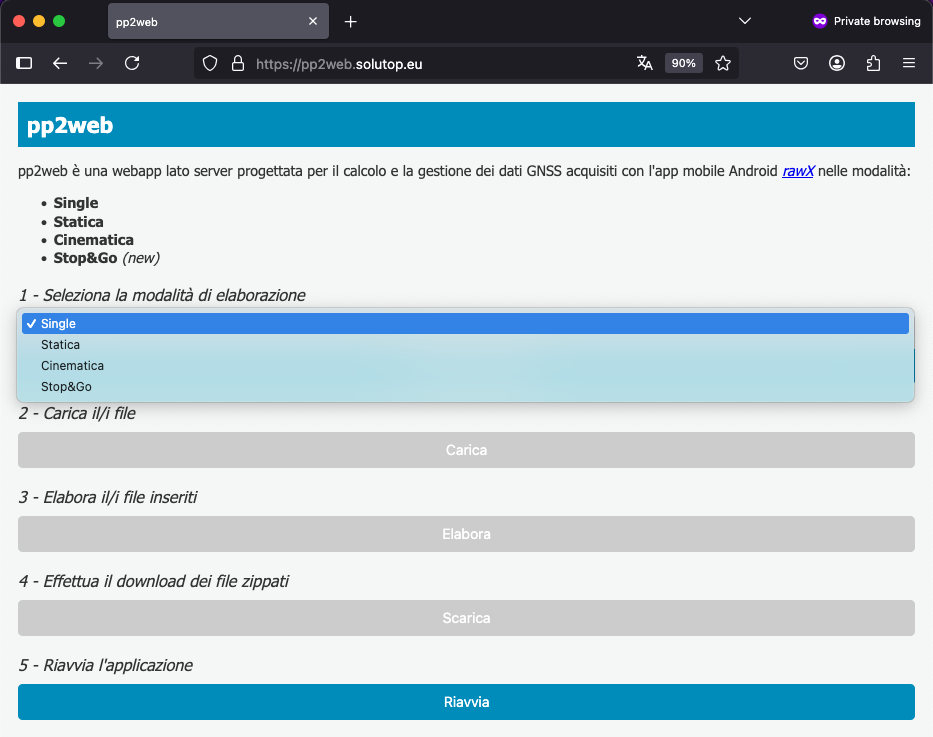
Fig.2 Scelta della modalità di elaborazione
Si procedere confermando la modalità ed inserendo:
- il file del rover in formato .ubx
- il file della master in formato .YYo o .obs
- il file contenente gli intervalli di stop e di go (solo modalità stop&go)
- l’eventuale altezza strumentale in metri (solo per le modalità single, statica o cinematica)
- le eventuali coordinate della master qual’ora ne fossimo in possesso come da fig. 3
NB. il processo è sequenziale per tanto è impossibile falsare la procedura come da fig. 3
Nota
Si fa presente che la modalità single esegue una post-elaborazione solamente con il file del rover in formato .ubx in quanto non è necessario alcun file della master per tale scelta perchè viene fatta un’elaborazione in modalità singola (soluzione metrica). Può servire ad esempio per conoscere le coordinate approssimative del punto registrato in un sistema geografico WGS84 (L,L,E)
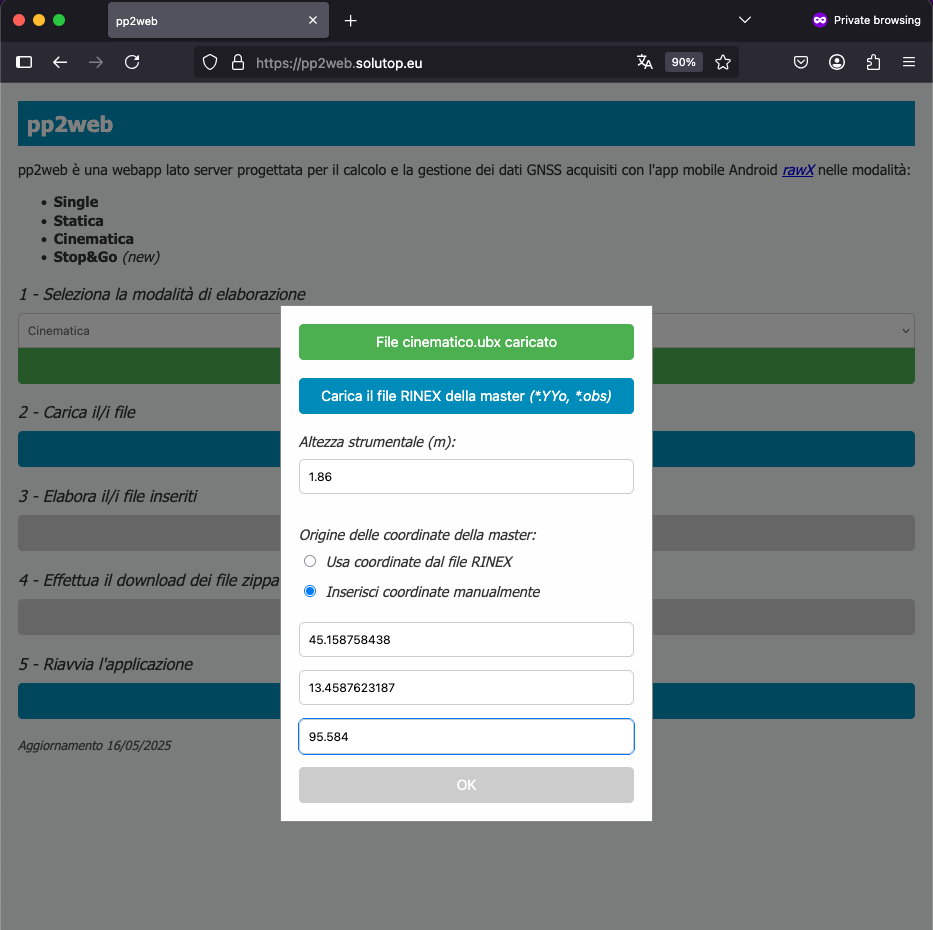
Fig.3 Import dei file e scelta delle coordinate geografiche
Nota
Nel caso di post elaborazione statica o cinematica disponete di file rinex virtuali, quando eseguirete l’inserimento dei file per avere le coordinate corrette della master non occorrerà inserire manualmente LLE in quanto nell’header del file rinex della master saranno già precise e non approssimate.
Qui sotto un esempio di un file rinex ad esempio scaricato da una stazione di riferimento master permanente, si noti l’header del file alla riga «APPROX POSITION XYZ» come evidenziato qui sotto:
2.11 OBSERVATION DATA M (MIXED) RINEX VERSION / TYPE
teqc 2016Apr1 OGS/CRS 20160608 12:19:48UTCPGM / RUN BY / DATE
Linux 2.4.21-27.ELsmp|Opteron|gcc|Linux x86_64|=+ COMMENT
BIT 2 OF LLI FLAGS DATA COLLECTED UNDER A/S CONDITION COMMENT
UDI1 MARKER NAME
12719M002 MARKER NUMBER
David Zuliani OGS/CRS OBSERVER / AGENCY
618-01139 TPS NET-G3A 4.1 May,31,2013 REC # / TYPE / VERS
24204 ASH701945E_M SCIT ANT # / TYPE
4317305.9964 1016832.9984 4568261.5793 APPROX POSITION XYZ
0.0083 0.0000 0.0000 ANTENNA: DELTA H/E/N
1 1 WAVELENGTH FACT L1/2
5 L1 L2 C1 P2 P1 # / TYPES OF OBSERV
1.0000 INTERVAL
Forced Modulo Decimation to 1 seconds COMMENT
SNR is mapped to RINEX snr flag value [0-9] COMMENT
L1 & L2: min(max(int(snr_dBHz/6), 0), 9) COMMENT
pseudorange smoothing corrections not applied COMMENT
2016 6 8 11 0 0.0000000 GPS TIME OF FIRST OBS
17 LEAP SECONDS
END OF HEADER
NB Le coordinate espresse sono geocentriche.
Terminato l’inserimento dei file ed eventuali coordinate geografiche della master si procede all’elaborazione semplicemente cliccando sul pulsante «Elabora», verrà realizzata un’elaborazione con parametri standard e al momento questa versione non permette l’edit dei parametri. Nel caso di messaggi di errori verranno visualizzati a video e il pulsante di elaborazione si colorerà di rosso bloccando le fasi successive come da figura 4
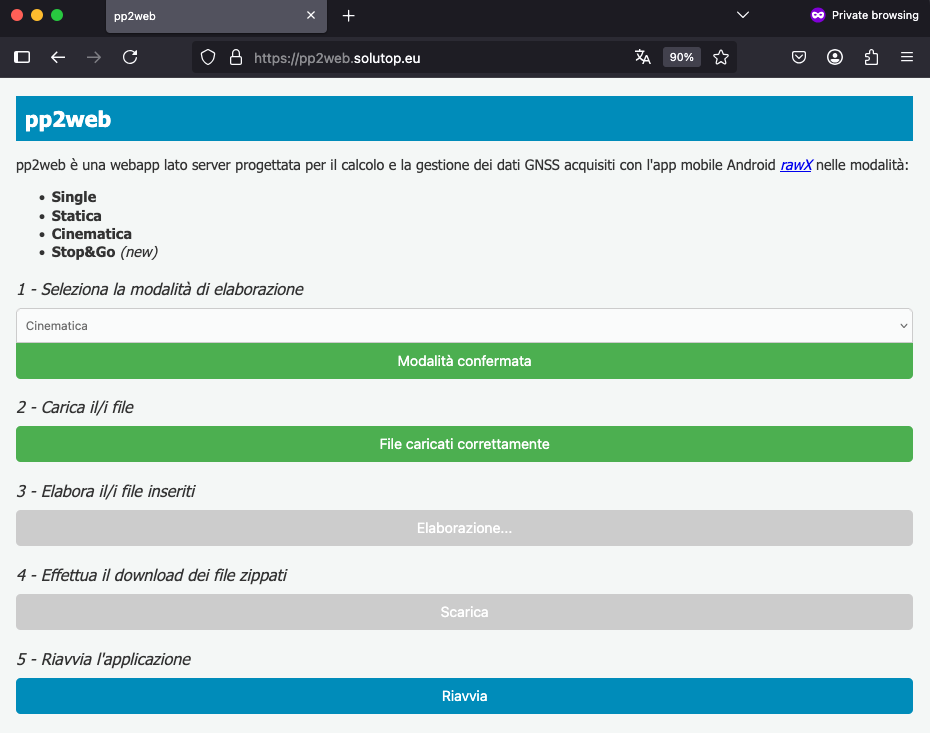
Fig.4 Elaborazione in corso dei file inseriti
Ultimata anche la fase di elaborazione il passaggio successivo è la visualizzazione dei punti su una mappa di OSM che permette di dare un primo controllo visivo veloce ai dati elaborati precedentemente. Questa fase è automatica e in sequenza alla precedente
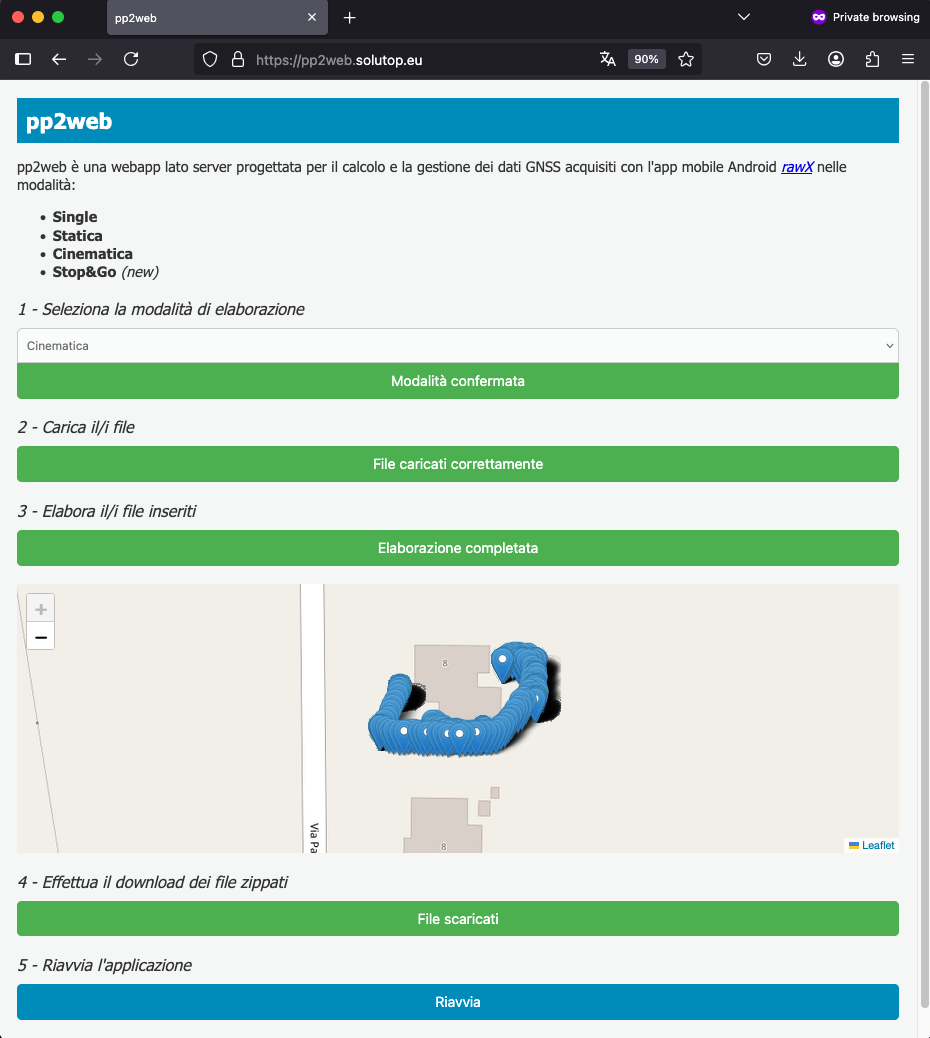
Fig.5 Risulato dell’elaborazione in mappa
Al termina anche di questa fase sarà possibile scaricare i risultati soffoforma di un file zippato che al suo interno conterrà:
- un file in formato .csv con le sole coordinate con la soluzione fix di tutte le epoche per la modalità single e statica, nonchè la singola coordinata per la modalità statica, derivante dalla media pesata di tutte le coordinate con la soluzione fix
- un file in formato .pdf con un report dettagliato descritto nel dettagio al paragrafo successivo
Report finale¶
Il report finale descrive nella sua globalità i risultati dell’elaborazione e contiene:
Osservazioni e Metadati (Observation Metadata)
- Durata complessiva delle osservazioni
- Periodo espresso in orario UTC
- Modalità
- Frequenze utilizzate
- Parametri: elevazione minima, correzioni ionosferiche, correzioni troposferiche, effemeridi
- ercentuale delle soluzioni
- Satelliti utilizzati
- Altezza strumentale (solo modalità single, statica o cinematica)
Traccia Cinematica (GRD Track)
Serie Temporale della Posizione (Position Time Series)
Riepilogo Dati (Data Summary)
Traccia Cinematica¶
Sotto in figura 6 un esempio di grafico che rappresenta il percorso tracciato dal ricevitore GNSS durante l’osservazione. Mostra visivamente il movimento del dispositivo su una mappa (se presente) o attraverso una sequenza di coordinate registrate in UTM con la zona di competenza in automatico.
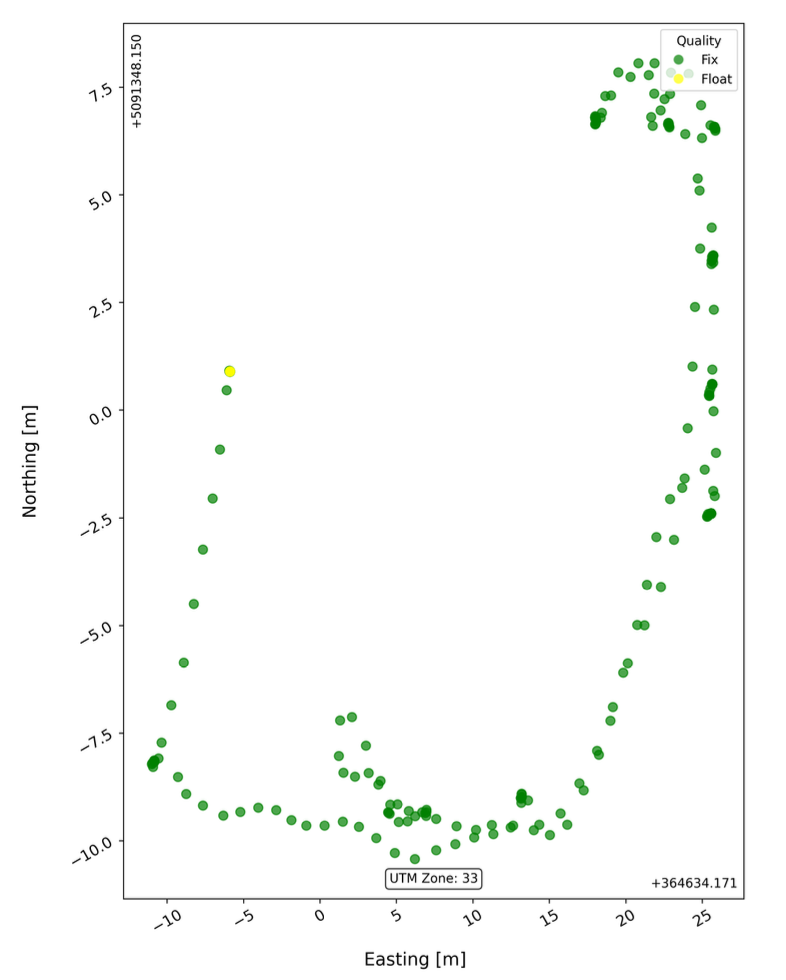
Fig.6 Grafico rappresentante la soluzione in E,N planimetrica
Dati forniti:
- Coordinate geografiche: Latitudine, longitudine ed elevazione del ricevitore
- Cambiamenti di posizione nel tempo
- Qualità della soluzione (Fix/Float ecc)
- Possibile correlazione grafica con la mappa del territorio
Scopo:
- Analisi della traiettoria e verifica del percorso in relazione al contesto spaziale
Serie Temporale¶
Sotto in figura 7 un esempio di grafico che rappresenta una serie temporale dettagliata di posizioni registrate dal ricevitore GNSS durante l’osservazione.
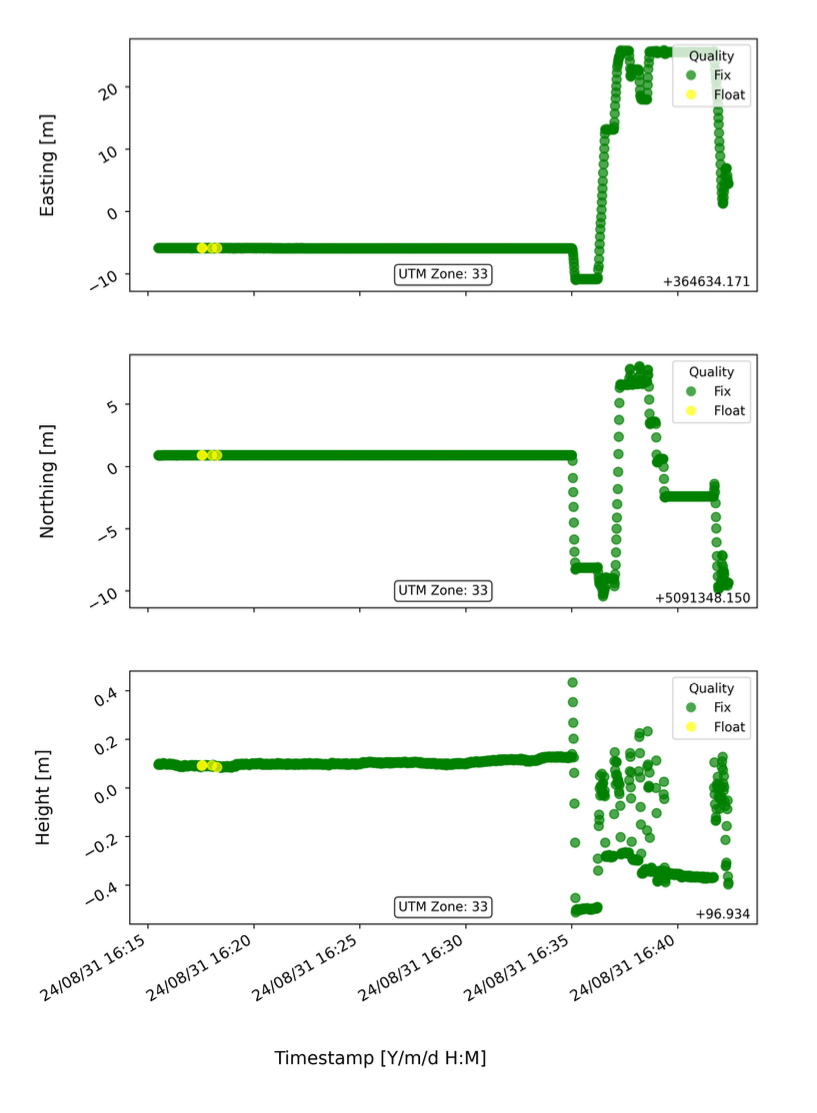
Fig.7 Grafico rappresentante la soluzione in E,N,H
Dati forniti:
- Timestamp: ogni posizione è associata a un’ora specifica in UTC
- Coordinate: Latitudine, longitudine e altezza (in metri)
- Precisione: Dodeviazioni standard orizzontali (SDH) e verticali (SDV)
- Qualità della soluzione: ogni posizione è marcata come Fix (alta precisione) o Float (precisione inferiore)
Scopo:
- Analisi dettagliata della qualità delle misure in funzione del tempo e della stabilità del sistema.
Riepilogo Dati¶
Sotto in figura 8 un parziale di esempio del riepilogo globale delle osservazioni e delle elaborazioni. Sono presenti tutte le singole epoche secondo per secondo indistintamente dalla qualità del punto.

Fig.8 Sommario delle epoche post-elaborate
Dati forniti:
- Statistiche complessive: durata totale della sessione con singole posizioni epoca per epoca in LLE (deg)
- Precisione generale: medie e deviazioni standard delle misure orizzontali e verticali e soluzione epoca per epoca
Scopo:
- Valutazione sintetica delle prestazioni del sistema e delle configurazioni utilizzate
Nota
La versione attuale non permette di fare il «settings dei parametri», quindi scelta sulle costellazioni da utilizzare, sui parametri di ionosfera e troposfera, angolo di cutoff ecc, ma per semplicità di utilizzo usa un file di configurazione standard e converte i file grezzi del rover al secondo
Per la modalità stop&go il Data Summary riporta l’altezza strumentale come colonna aggiuntiva come da fig. 9 sottostante:
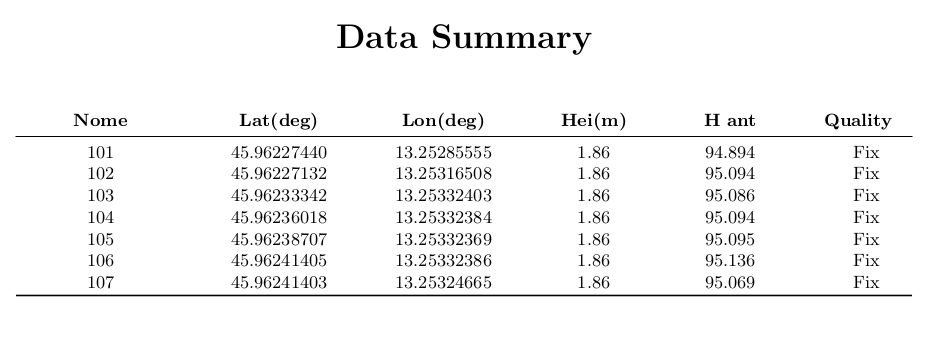
Fig.9 Sommario con i punti fissati in stop&go
Gestione dei timestamp¶
| Scala | Descrizione | Esempio |
|---|---|---|
| UTC | Tempo civile mondiale, include i leap seconds | 14:40:32 |
| GPST | Tempo continuo del sistema GPS, parte dal 6/1/1980, non include i leap seconds | 14:40:50 |
Differenza attuale: GPST = UTC + 18 s (valore valido dal 1/1/2017).
Nei messaggi UBX il ricevitore MS2 include sempre il campo leapS, che
riporta i 18 secondi correnti, così il software a valle può convertire
da solo.
┌─────────────────────────┐
│ Ricevitore MS2 │
│ rcvTow + week + leapS │
└────────────┬────────────┘
│ stream binario UBX
▼
┌─────────────────────────┐ ┌──────────────────────┐
│ App Android rawX │ eventi │ CSV Stop&Go │
│ ├───────────────►│ Timestamp UTC │
│ │ │ (orologio telefono)│
└────────────┬────────────┘ └──────────┬───────────┘
│ raw bytes │
▼ │
┌─────────────────────────┐ │
│ File .ubx (GPST) │ │
└────────────┬────────────┘ │
│ │
╔════════════▼════════════════════════╗ │
║ pp2web — post-processing ║ │
║ (motore RTKLIB) ║ │
║ ║ │
║ UBX → RINEX (GPST) ║ │
║ ↓ ║ │
║ PPK con out-timesys = utc ║ │
║ ↓ ║ │
║ File .pos (UTC) ◄── conversione ║ │
║ GPST→UTC ║ │
║ ↓ ║ │
║ modulo Stop&Go ║◄──────────────┘
║ confronta CSV (UTC) con .pos (UTC)║
║ sulle finestre Stop→Go ║
╚════════════════════╤════════════════╝
│
▼
┌──────────────────────────────────────────┐
│ *_events_filtrato.csv │
│ *_events_media.csv ← coordinate finali │
└──────────────────────────────────────────┘
Dati presi da una sessione reale di campagna del 19/06/2025.
# Modalità: Stop&Go
Point,Timestamp,Action,Height
1A,2025/06/19 14:40:32.925,Stop,2.07
1A,2025/06/19 14:41:32.945,Go,2.07
2A,2025/06/19 14:43:12.162,Stop,2.07
2A,2025/06/19 14:43:14.008,Go,2.07
L’orario è scritto in UTC dall’orologio del telefono.
| Campo | Valore |
|---|---|
rcvTow |
398 450.981 s (dall’inizio della settimana GPS) |
week |
2371 |
leapS |
18 |
| GPST ricostruito | 2025-06-19T14:40:50.981 |
| UTC dopo sottrazione di leapS | 2025-06-19T14:40:32.981 |
| UTC | GPST | |
|---|---|---|
| Timestamp dal CSV | 14:40:32.925 |
— |
| Timestamp ricostruito dall’UBX | 14:40:32.981 |
14:40:50.981 |
| Delta in UTC | +56 ms | |
| Delta in GPST | −18 056 ms |
I −18 secondi sono esattamente i leap seconds, i −56 ms sono il piccolo drift dell’orologio Android rispetto al tempo GPS.
pp2web orchestra tre fasi interne, sfruttando RTKLIB come motore di calcolo:
Il file .ubx viene trasformato in osservazioni RINEX. In questa fase
il tempo è ancora in GPS time: il file di osservazione non è stato
convertito in UTC.
È qui che avviene la conversione fondamentale. La configurazione
interna di pp2web istruisce RTKLIB con out-timesys = utc: il motore
legge il leap second fornito dal ricevitore e produce il file .pos
con le epoche già in UTC. Da questo momento in poi il tempo è
uniforme: stessa scala usata anche dal CSV degli eventi.
pp2web prende le finestre Stop → Go dal CSV e, per ciascuna,
seleziona dal file .pos tutte le epoche con timestamp che ricadono
nell’intervallo. Su quelle epoche calcola la media ponderata delle
coordinate (lat, lon, quota), pesata sull’inverso del quadrato delle
deviazioni standard, e infine sottrae l’altezza strumentale del punto.
Entrambi i flussi (CSV ed epoche .pos) sono già in UTC, quindi non
viene applicata alcuna correzione di leap second.
Il “trucco” sta nel fatto che ogni componente della pipeline svolge un ruolo una sola volta:
- rawX non sa nulla del GPS, scrive l’orario civile UTC.
- Il ricevitore MS2 scrive il GPS time e allega il leap second.
- pp2web (tramite RTKLIB) è l’unico componente che converte fra le
due scale, e lo fa una volta sola al momento di emettere il
.pos. - La fase di unione con gli eventi Stop&Go lavora solo in UTC, su due flussi già coerenti.
In altre parole: la responsabilità della conversione GPST↔UTC è
centralizzata in pp2web, e dipende da una sola riga di
configurazione (out-timesys = utc) impostata internamente.
| Sintomo | Causa probabile | Dove guardare |
|---|---|---|
I punti del
.pos non
cadono nelle
finestre del
CSV (off di
~18 s) |
configurazione di pp2web con sistema temporale errato | il file di configurazione dell’elaborazione PPK |
| S tazionamenti scartati con messaggio “almeno 2-3 secondi” | countdown rawX troppo breve | impostazione del countdown nell’app |
| Delta CSV-UBX > 1 secondo in UTC | orologio Android desincronizzato | impostazioni del telefono → data/ora automatica |
| Tutte le soluzioni Q5 (single point) | RINEX della base non copre la sessione | copertura temporale della base station |
- I 18 secondi di leap second non vanno applicati a mano: li gestisce
pp2web tramite la sua configurazione interna (
out-timesys = utcpassata a RTKLIB). - Il file
.csvdi rawX è in UTC nativamente (orologio Android, NTP). - Il file
.posprodotto da pp2web è in UTC dopo la conversione interna. - L’unione finale degli eventi Stop&Go confronta UTC ↔ UTC: nessun rischio di disallineamento.
- L’unico residuo è il drift dell’orologio del telefono, tipicamente decine di ms — irrilevante per Stop&Go con stazionamento ≥ 2 s.
Tutorial Video¶
In questa sezione vengono descritte le procedure di utilizzo della webapp con dei videotutorial che ne descrivono nello specifico le singole funzioni per l’utilizzo e i risultati finali.